


在当今物联网(IoT)和工业自动化领域,通信协议的选择直接影响到系统的可靠性、效率和应用的广泛性。两种常用的通信方式是CAN通信和串口通信。本文将对这两种通信方式进行详细比较。
| CAN通信与串口通信的基本概述
1. 什么是CAN通信?
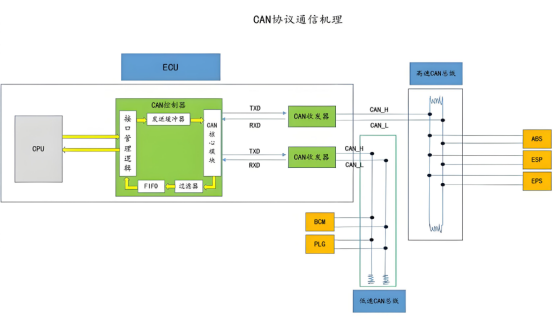
CAN是Controller Area Network的简称,即控制器局域网,是一种广泛用于工业自动化、汽车控制系统等领域的多主站串行通信协议。CAN具有高速、可靠和灵活的特点,适用于需要快速传输大量数据的应用。CAN总线采用基于ID的数据帧传输方式,可以在总线上广播发送数据,多个节点可以同时接收数据,从而实现多主控制。
2. 什么是串口通信?
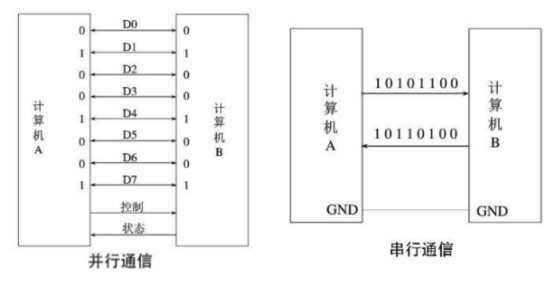
串口通信是一种简单的点对点通信方式,主要用于设备之间的低速、低容量数据传输。串口通信通过一对传输线(通常是RXD和TXD)完成数据的发送和接收,常用于连接鼠标、键盘、打印机等外设。串口通信的速度相对较低,最高传输速率通常为115200bps,适合短距离传输。
| CAN通信与串口通信的主要区别
1. 通信速度与距离
l- CAN通信:支持较高的通信速率,最高可达1Mbps,并且支持远距离通信,最远可达10公里。
l- 串口通信:传输速率较低,最高为115200bps,且传输距离较短,通常在几米到几十米之间。
2. 网络结构与数据帧格式
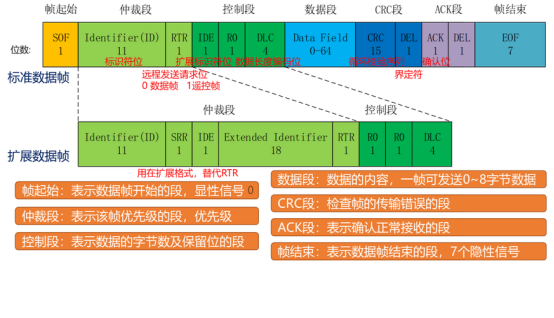
l- CAN通信:采用多主站结构,基于ID的数据帧传输方式,可以实现广播通信和多节点接收。每个数据帧包含标识符(ID)、控制位、数据位、CRC校验等部分。
l- 串口通信:通常是点对点的连接,数据帧格式较为简单,包括起始位、数据位、校验位和停止位。
3. 应用场景与灵活性
l- CAN通信:广泛应用于汽车电子系统、工业自动化设备等需要高实时性和高可靠性的场景。由于其多主站和广播特性,适用于复杂网络环境。
l- 串口通信:适用于简单的设备间通信,如计算机与外设之间的数据传输。其实现简单,成本低廉,但不适用于大规模或高实时性要求的网络环境。
塔石物联网秉承“让物联更简单”的理念,致力于为客户提供高质量、低成本的物联网解决方案。公司注重技术创新和客户服务,努力成为物联网行业的领先者。
了解更多物联网知识和产品:进入塔石物联网
塔石专注于物联网信息产品的开发、生产、销售和技术服务。自2017年成立以来,已推出DTU、串口服务器、RTU、工业路由器/网关、传感器、模块模组6大系列两百多款产品,经过多年的技术沉淀及理论创新,除了成熟的工业设备,我们还为客户提供专业的方案定制和技术支持。



