1029
1029

机器人通讯,即机器人通信系统,是智能机器人个体以及群体机器人协调工作中的一个重要组成部分,是信息和通信技术在机器人领域的应用学科。以下是对机器人通讯的详细解析:
机器人通讯系统通过一定的方式对信息数据进行编码或解码,并利用通信载体进行信息数据的传输。从通信对象的角度,机器人通讯系统可以分为内部通讯和外部通讯。
l内部通讯:为了协调单个机器人内部模块间的功能行为,类似于人体大脑与各个组织器官之间的神经网络。
l外部通讯:指机器人与控制者或者多个机器人之间的信息交互,它一般通过独立的通信专用模块与机器人整合实现。
一个标准的点对点直接通讯系统主要由以下部分组成:
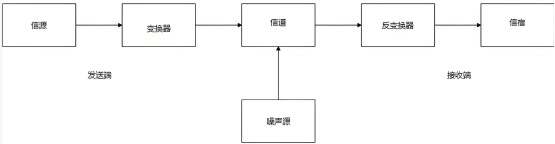
l信源:把待传输的消息转换成原始信号。
l发送设备:也称为变换器,它将信源发出的消息变换成适合在信道中传输的信号,使原始信号(基带信号)适应信道传输特性的要求。
l信道:传递信息的通道及传递信号的设施。按传输介质(又称传输媒质)的不同,分为有线信道和无线信道(如微波通信、卫星通信、无线接入等)。
l接受设备:其功能与发送设备相反,把从信道上接受的信号变换成信息接收者可以接收的信息,起着还原的作用。
l受信者(信宿):信息的接收者,将复原的原始信号转换成相应的信息。
l噪声源:指系统内各种干扰影响的等效结果。
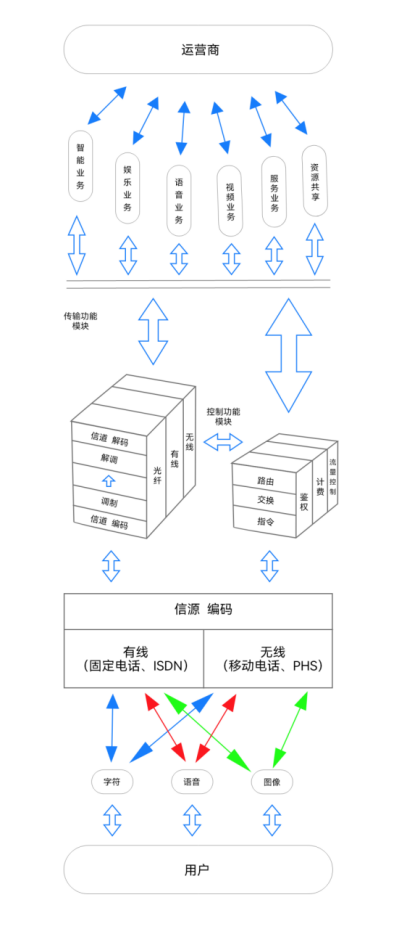
现代通讯系统的功能模型主要包括以下模块:
l接入功能模块:将语音、图像或数据进行数字化并变换为适合于网络传输的信号。
l传输功能模块:将接入的信号进行信道编码和调制,变为适合于传输的信号形式。
l控制功能模块:完成用户的鉴权、计费与保密,由信令网、交换设备和路由器组成。
l应用功能模块:为运营向提供业务经营。

lWi-Fi:被广泛应用于笔记本电脑、手机、平板电脑中,用于支持设备通过无线的方式连接互联网,也是目前自动化设备以及智能机器人产品中最常用的通讯方式之一。
l蓝牙:由爱立信公司创立,用于手机与外围设备的连接,如蓝牙耳机、蓝牙GPS等。蓝牙使用时分双工的模式来实现全双工通讯,是一种特殊的2.4G无线技术,遵循IEEE 802.15.1协议。蓝牙具有通讯速率快、连接简单、全球通用、功耗低等特点,广泛用于手机、计算机、娱乐外围设备中。
lIrDA:使用红外线进行通讯,是一种低成本的通讯方案。IrDA制定了一个半双工的通讯系统,通讯范围在1m左右,传输角度在30°~60°之间。因为使用红外线作为通讯媒介,IrDA的数据传输最大可以达到4Mbps。IrDA的劣势在于对传输路径的要求比较高,传输距离、收发角度都有限制,这限制了其应用领域。
lZigBee:随着物联网、车联网与智能家居概念的发展流行,ZigBee开始受到关注。ZigBee基于IEEE 802.15.4标准,由ZigBee联盟制定,具有自组网、低速率、低功耗的特点,尤其适合小型设备组网的需要。
与传统意义上的有线电话网络或者无线蜂窝网络通讯系统不同,移动机器人通讯的主体是移动机器人,其应用背景的不同对通讯系统的要求有很大的区别。
l通讯系统的健壮性:在移动机器人系统中,能够实时提取机器人系统的信息和发送控制指令是十分必要的。通讯系统应当能够提供较好的通讯质量,尽量降低网络延迟。对于多移动机器人系统的视频数据传输等场合,这一点尤其必要。在战场或科学考察等具有重大意义的场合,要求机器人的通讯系统具有出色的健壮性,以确保设备回收或者数据反馈。
l能量受限:由于机器人采用自身电池供电,不但要提供通讯所需电能,更要为行走、实物操作等对能量有较大需求的模块提供能量。但其能量有限,这关系到系统的生存能力和安全性。因此,在设计移动机器人的通讯系统时,有必要考虑其能量特性,尽可能采用能量消耗较少的系统设计。
l体积受限:通讯模块过大,会带来安装上的不便,同时还会给机器人驱动模块带来额外的负荷,降低机器人的灵活性,限制其应用场合。
综上所述,机器人通讯系统是机器人领域中至关重要的技术之一。随着技术的不断发展,未来机器人通讯系统将会更加完善、高效和智能。
塔石专注于物联网信息产品的开发、生产、销售和技术服务。自2017年成立以来,已推出DTU、串口服务器、RTU、工业路由器/网关、传感器、模块模组6大系列两百多款产品,经过多年的技术沉淀及理论创新,除了成熟的工业设备,我们还为客户提供专业的方案定制和技术支持。

长按屏幕识别二维码
打开手机扫描二维码