


| GNSS定义
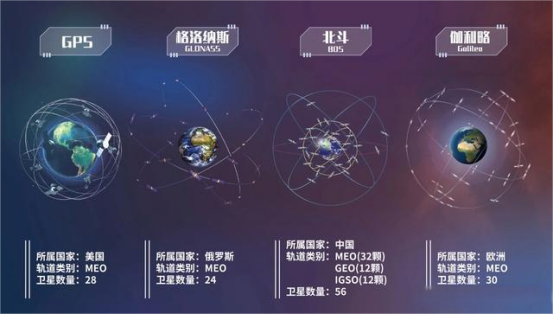
全球导航卫星系统(Global Navigation Satellite System,简称GNSS)是一个泛指,涵盖了所有提供全球覆盖的卫星导航系统。GNSS不仅包括全球性的系统,如美国的GPS、俄罗斯的GLONASS、欧盟的Galileo以及中国的北斗卫星导航系统(BDS),也包括区域性和增强型系统。GNSS的主要功能是为全球范围内的用户提供高精度的位置、速度和时间信息,这些信息对于军事、民用、科研等多个领域都至关重要。
| GNSS组成
GNSS系统由三个主要部分组成:空间段、控制段和用户段。
1 空间段
空间段由在轨运行的卫星组成,这些卫星负责广播包含自身轨道、位置和时间信息的导航信号。例如,GPS系统由31颗在轨工作卫星组成,而北斗三号系统则由3颗地球静止轨道卫星(GEO)、3颗倾斜地球同步轨道卫星(IGSO)和24颗中圆地球轨道卫星(MEO)构成。
2 控制段
控制段包括地面的主控站、监测站和数据上传站,它们负责跟踪卫星信号、收集数据、更新导航信息、进行卫星控制和维护。控制段确保卫星信号的准确性和可靠性,通过不断更新星历(ephemeris)和时间校准来实现。
3 用户段
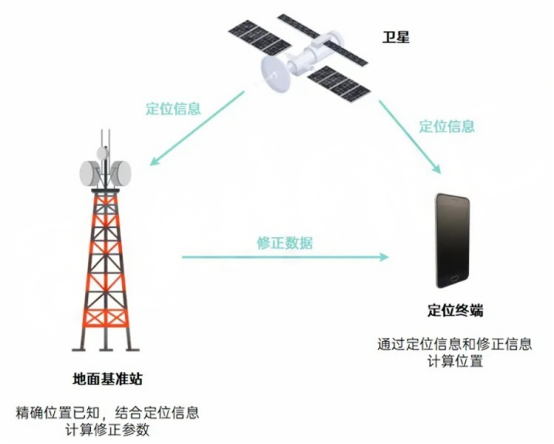
用户段指的是所有能够接收GNSS信号并计算出位置信息的设备,包括各种GNSS接收机。这些接收机可以是手持设备、车载导航系统、航空器上的导航设备等。用户段设备通过接收至少四颗卫星的信号,利用三角测量原理计算出接收器的精确位置。高精度应用中,还会使用差分GNSS(DGNSS)技术,通过基准站提供校正信息,进一步提升定位精度。
| GNSS工作原理
1 定位基础与三角测量原理
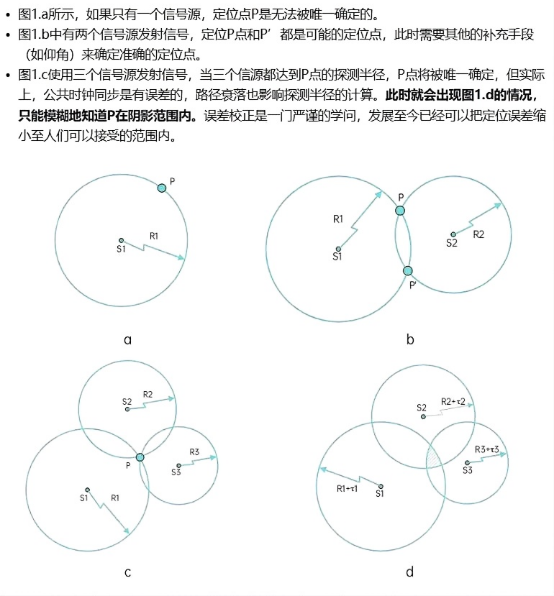
三角测量之三圆相交示意图
GNSS定位系统的工作基础是三角测量原理,即通过测量接收器与至少四颗已知位置的卫星之间的距离来确定接收器的精确位置。这种测量依赖于卫星发射的信号传播时间,即从卫星到接收器的信号传播延迟。由于光速是已知的,因此可以通过测量时间延迟来计算距离,即伪距(pseudorange)。
2 信号传播与时间延迟
GNSS卫星在空中连续发送带有时间和位置信息的无线电信号,供GNSS接收机接收。由于信号传播的距离因素,接收机接收到信号的时刻要比卫星发送信号的时刻延迟,这种延迟称为时延。通过测量时延,结合光速,可以确定从卫星至接收机的到达时间差,进而计算出距离。
3 伪随机码与时间同步
每颗GNSS卫星上的计算机和导航信息发生器非常精确地了解其轨道位置和系统时间,而全球监测站网保持连续跟踪卫星的轨道位置和系统时间。GNSS接收机通过与卫星信号中的伪随机码(PRN)实现时间同步,从而能够测定时延。伪随机码是卫星信号中的一种独特的码序列,用于识别卫星和测量时间延迟。
4 定位解算过程
GNSS接收机至少需要接收来自四颗卫星的信号来解算位置,这是因为需要解决四个未知数:接收机的三个空间坐标(x, y, z)和一个时间偏差(t)。通过测量接收机与每颗卫星之间的伪距,结合卫星的精确位置,可以建立四个方程,解算出接收机的位置和时钟偏差。
5 误差来源与校正
GNSS定位过程中存在多种误差源,包括卫星钟差、星历误差、电离层延迟、对流层延迟、多路径效应和接收机噪声等。为了提高定位精度,需要对这些误差进行校正。差分GNSS(DGNSS)技术通过基准站提供校正信息,可以显著减少这些误差的影响,提升定位精度。
6 现代GNSS系统的进步
随着技术的发展,现代GNSS系统如GPS III、GLONASS-K、Galileo和北斗三号系统都在不断进步,提供更高的定位精度和更可靠的服务。例如,GPS III卫星具有更强的抗干扰能力、可控的完好性性能和更高的精度。北斗三号系统则通过混合星座的配置,增强了全球覆盖能力和定位精度,特别是在亚太地区的性能表现更为突出。
了解更多物联网知识和产品:进入塔石物联网
塔石专注于物联网信息产品的开发、生产、销售和技术服务。自2017年成立以来,已推出DTU、串口服务器、RTU、工业路由器/网关、传感器、模块模组6大系列两百多款产品,经过多年的技术沉淀及理论创新,除了成熟的工业设备,我们还为客户提供专业的方案定制和技术支持。







