1090
1090
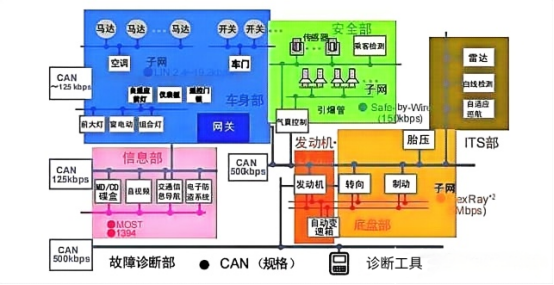
CAN协议(Controller Area Network)是一种串行通信协议,最初由德国BOSCH公司在20世纪80年代为汽车行业开发。它是一种用于实时应用的多主控制网络协议,具有高可靠性和灵活的错误处理能力。CAN协议已经被广泛应用于汽车业、航空业、工业控制、安全防护等领域。
1. 多主控制:CAN总线上的所有节点没有主从之分,任一节点均可在任意时刻主动地向网络上其他节点发送信息,通信方式灵活。
2. 非破坏性位仲裁:当两个或多个节点同时尝试发送数据时,通过标识符的逐位仲裁来解决冲突,确保数据的完整性。
3. 系统的柔软性:在总线上增加节点时,其他节点的软硬件及应用层都不需要改变,易于扩展。
4. 实时性强:CAN协议的设计注重实时性,适用于对通信延迟要求极高的实时控制系统。
5. 抗干扰能力强:CAN总线采用差分信号传输,具有出色的抗干扰能力,能够在嘈杂的电磁环境中稳定运行。
6. 可靠的错误处理和检错机制:CAN协议包括错误检测、错误通知和错误恢复功能,确保数据通信的可靠性。
7. 故障封闭功能:当总线上某个节点发生持续数据错误时,可将该节点从总线上隔离出去。

- 汽车控制系统:用于汽车的发动机控制、车辆安全系统、信息娱乐系统等。
- 工业控制系统:用于机器人控制、自动化生产线、传感器网络等,实现实时数据交换和远程控制。
- 航空航天:用于飞机、卫星和无人机的控制系统中,负责飞行控制、数据记录、健康监测等。
- 智慧农业:实现精准农业,通过集成GPS导航、土壤湿度传感器、温度传感器等,提高作业精度和效率。
- 智能家居:连接各类智能设备,实现统一管理和控制,如智能门锁、安防摄像头、环境监测传感器等。
CAN协议的通信速率和总线长度有关,高速CAN的速率可达1Mbps,而低速CAN在传输速率为40kbps时,总线长度可达1000米。此外,CAN总线的物理层是将ECU连接至总线的驱动电路,总线上的节点数可达110个。CAN的数据链路层是其核心内容,完成数据打包/解包、帧编码、媒体访问管理、错误检测、错误信令、应答等功能。CAN协议的报文类型包括数据帧、远程帧、错误帧、过载帧和间隔帧。
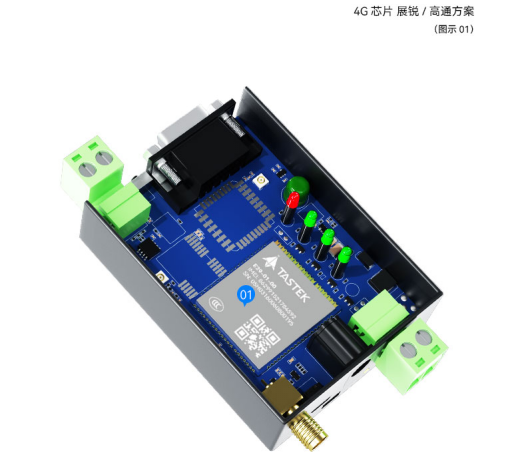
塔石专注于物联网信息产品的开发、生产、销售和技术服务。自2017年成立以来,已推出DTU、串口服务器、RTU、工业路由器/网关、传感器、模块模组6大系列两百多款产品,经过多年的技术沉淀及理论创新,除了成熟的工业设备,我们还为客户提供专业的方案定制和技术支持。

长按屏幕识别二维码
打开手机扫描二维码